The HALCON operator, vector_to_pose, determines the 3D spatial relationship between the camera and world coordinate systems when given at least…

The HALCON operator, vector_to_pose, determines the 3D spatial relationship between the camera and world coordinate systems when given at least…
Thinning out 3D Models Nowadays, point clouds representing a sampled version of real world objects or nodes of an artificial…

Combining multiple images into a larger image has become quite convenient with the new calibration targets introduced with HALCON 12….

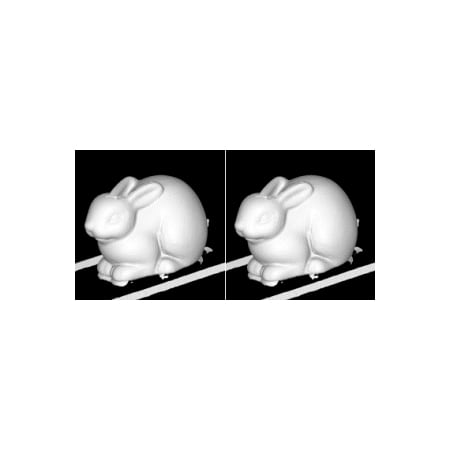
HALCON’s surface-based 3D matching method allows users to locate an object in a 3D point cloud scene and determine its…

For more than 15 years, HALCON has parallelised operators internally to take advantage of multiple CPU cores. This is done…

MVTec has successfully tested its HALCON machine vision software on DragonBoard using the board’s native 64-bit instruction set. Arrow Electronics’ DragonBoard…

Increasing the field of view by calibrated mosaicking Sometimes one camera is not enough to cover the desired field of view…

The newest HALCON 12 maintenance release is now available for download. This release comes with major improvements in bar code…

Developers of machine vision applications often require extra functionality that is not directly related to image processing. One frequent task,…

Here we introduce the new concept of 3D scenes that comes with HALCON 12. The main feature of it is that…

The Just In Time Compiler (JIT), is designed to speed up processes without the necessity to use a compiled language such…

HALCON 12 introduce a new data type named ‘vector’. Vectors allow you to create multi-dimensional arrays, which was not possible…